智能物流搬运|竞赛作品
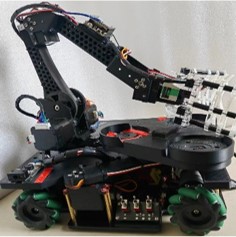
从扫码接单到精准落位
一台机器人完成全链路搬运
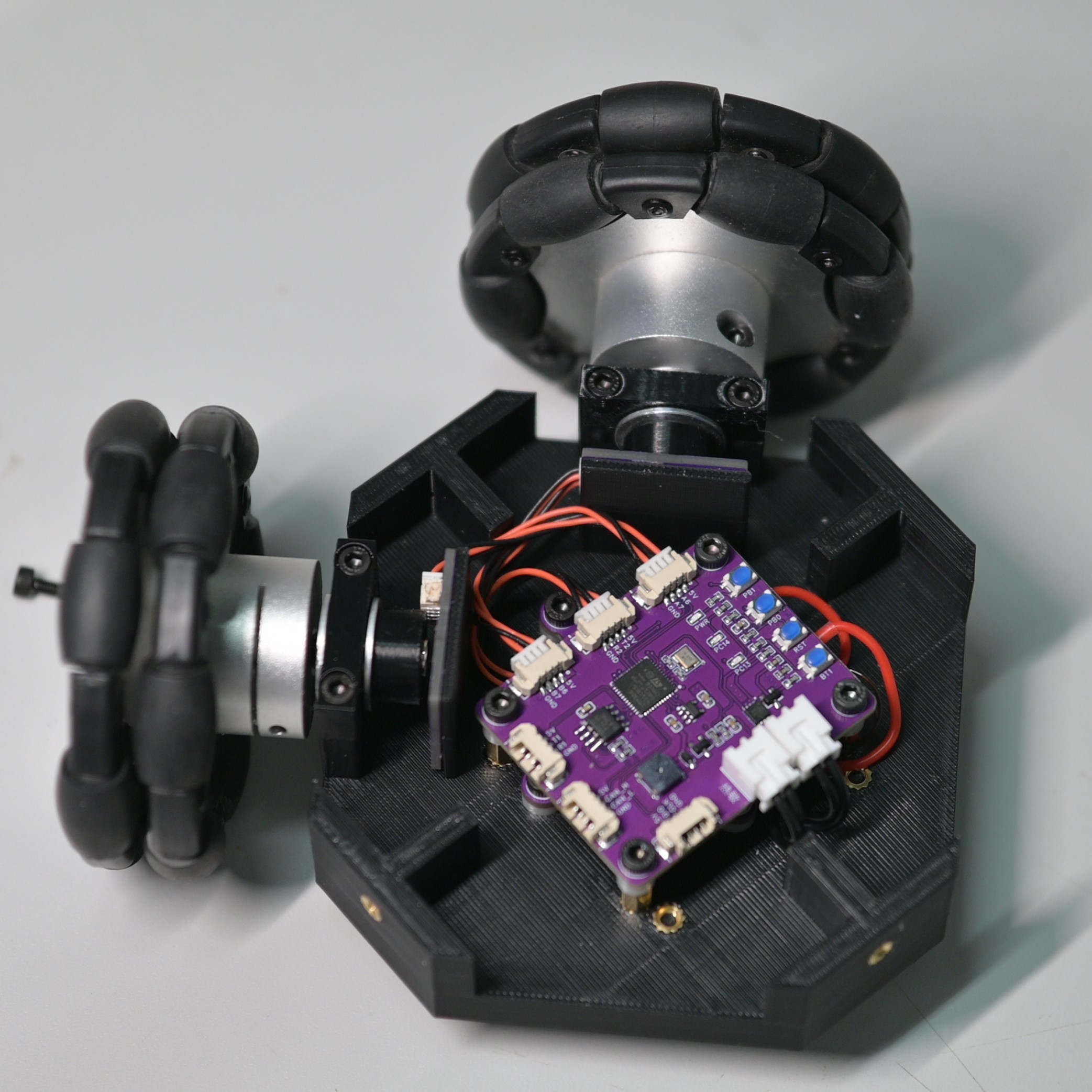
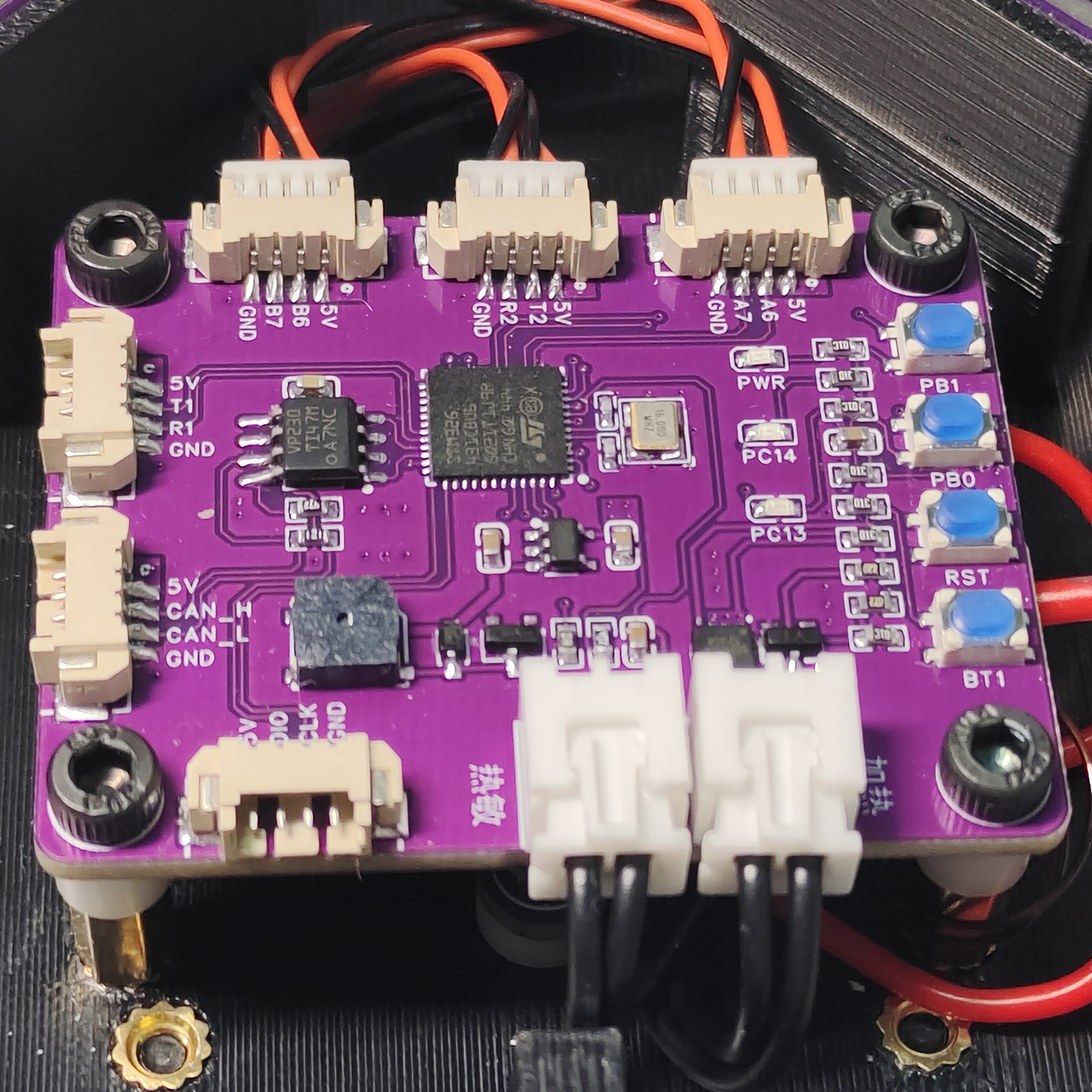
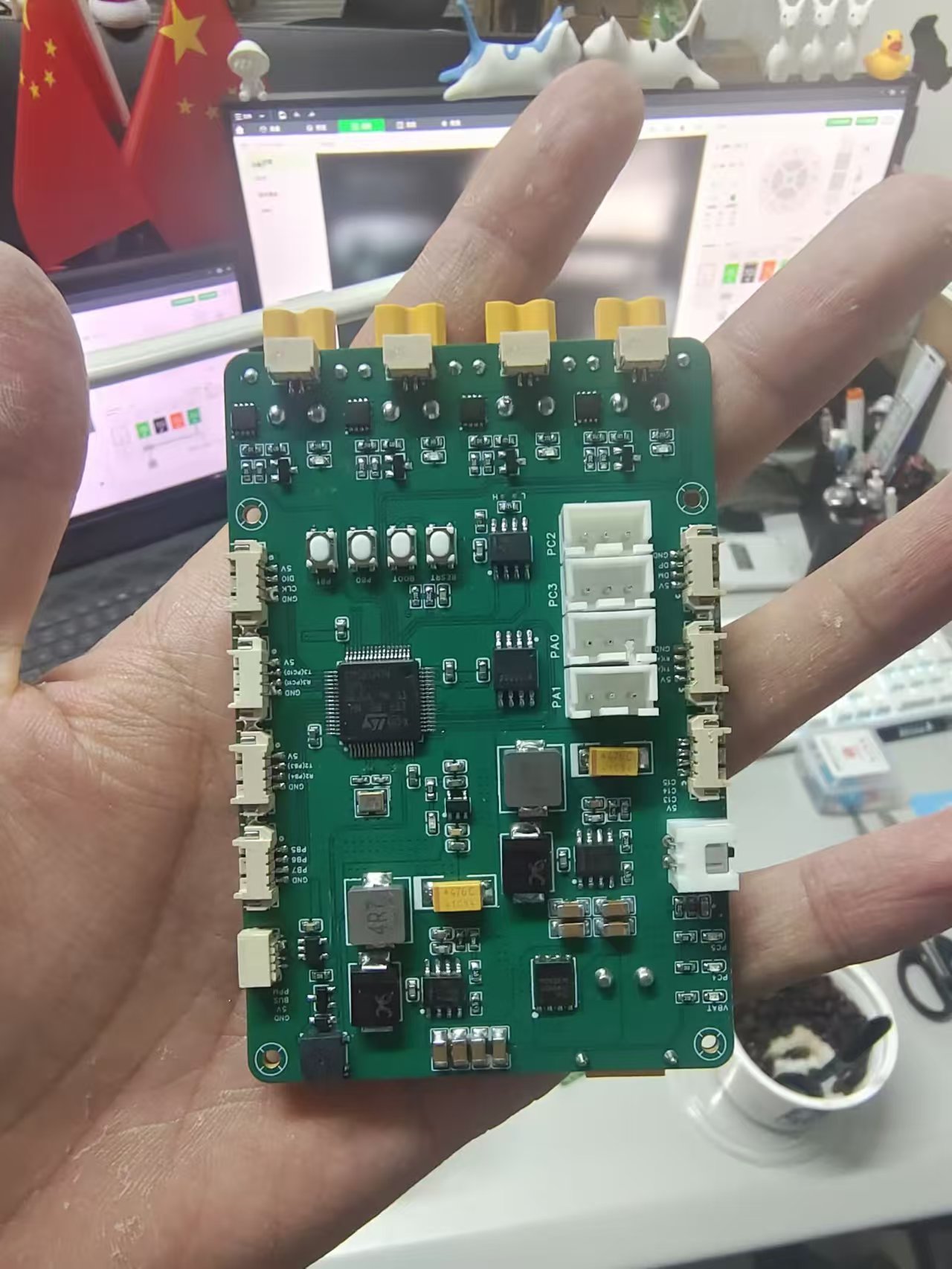
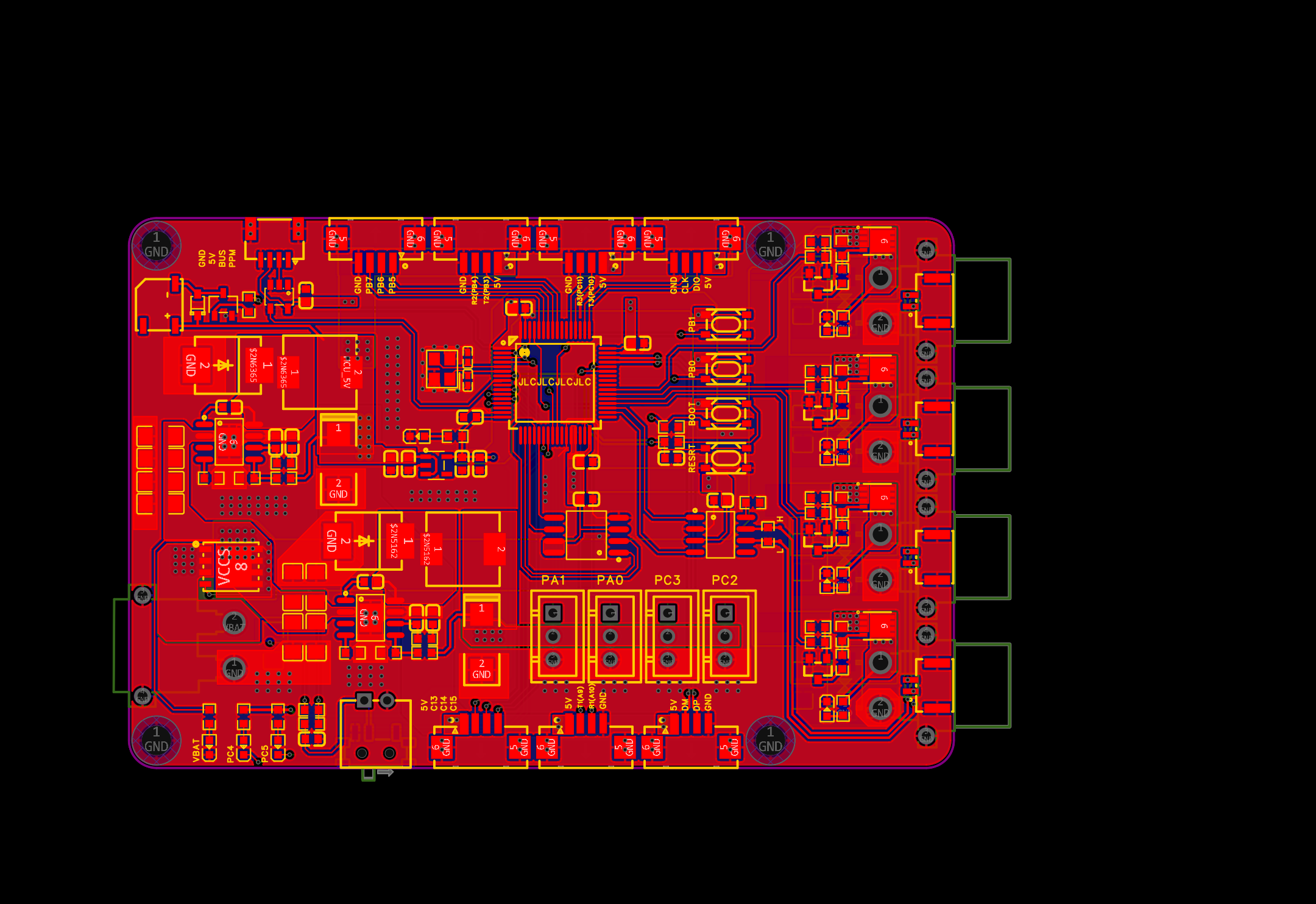
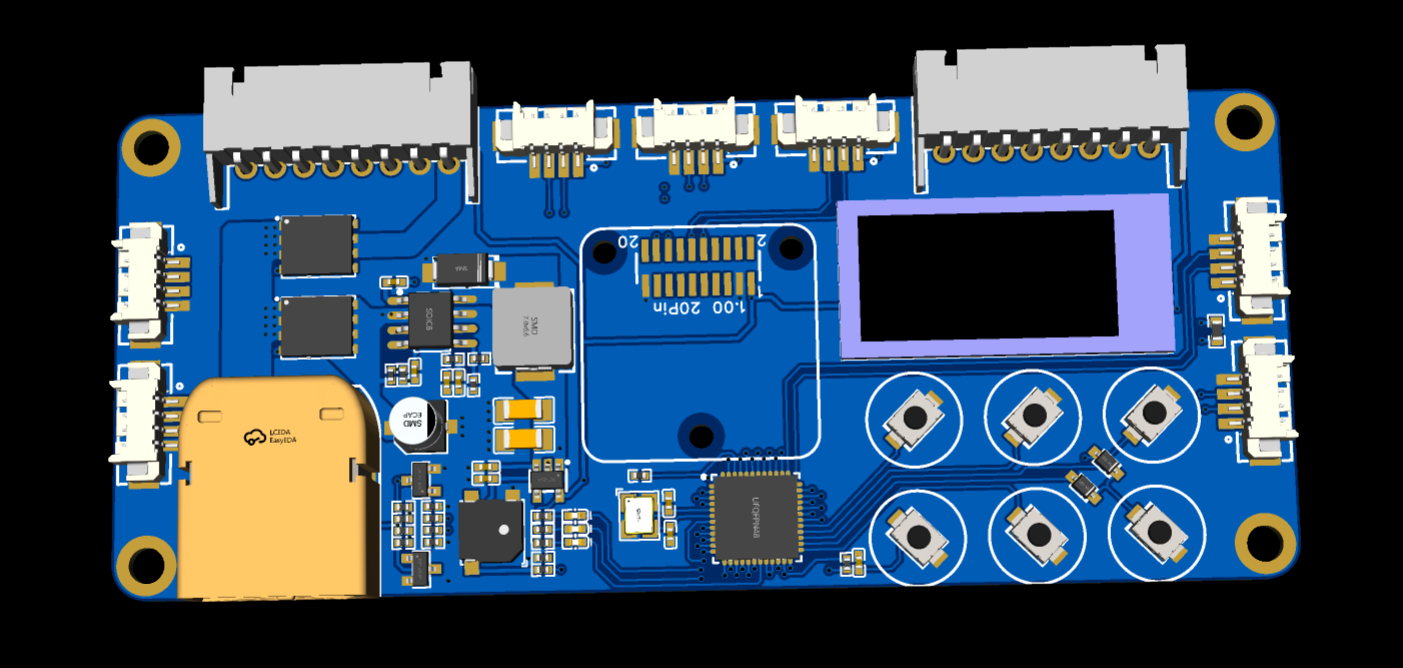
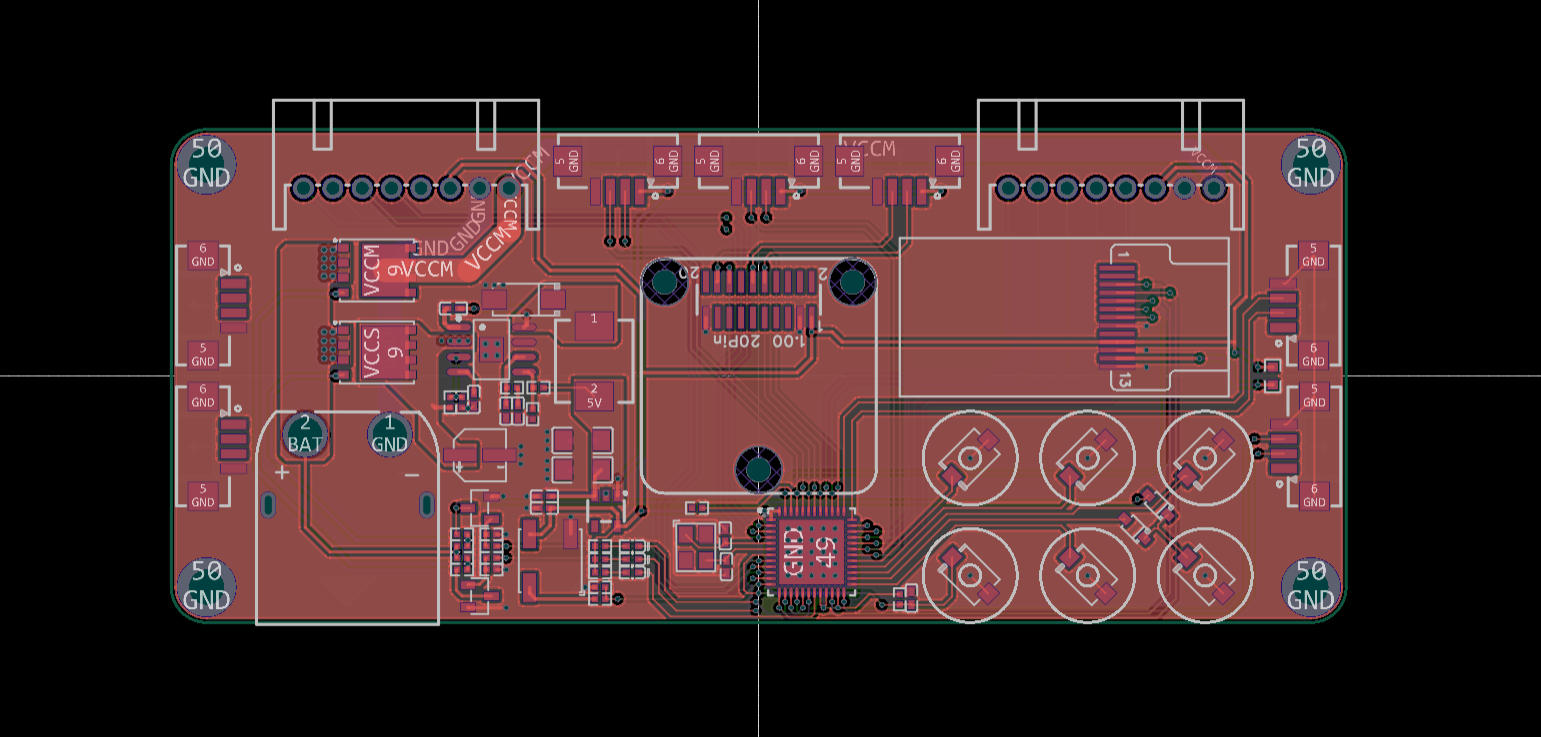
四块控制板分工:底盘调度行走、机械臂执行、外设扫码、视觉对位;串口互联,指令简单、可扩展。 双扫码获取任务码,视觉纠偏与抓取/放置点识别,机械臂与物料盘协同,减少位移与时间。 目标是“一次接单,一套动作”,在比赛里做到稳定、快速、可复用。
分布式控制底盘 / 机械臂 / 外设 / 视觉
任务链路扫码接单 → 纠偏 → 抓取/放置
竞赛认可2023 工创赛|国赛金奖

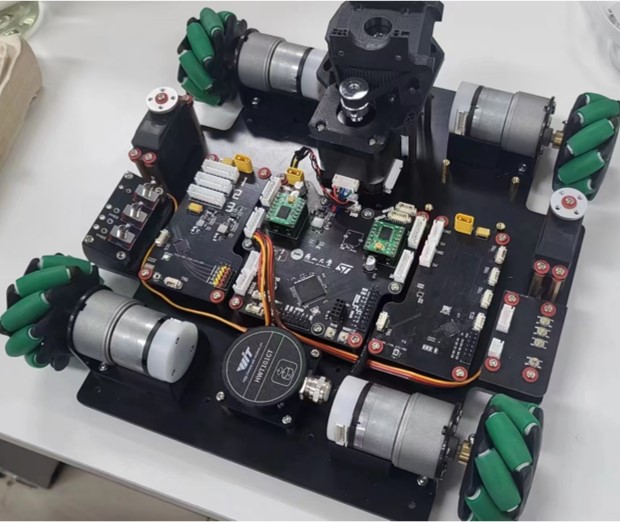
四控制器分布式 · 双扫码 + 视觉对位 · 机械臂协同